
- Veröffentlichungsdatum : 09.08.2019
- – Letztes Update : 21.08.2019
- 8 Min -
- 1679 Wörter
- - 11 Bilder
GPS, Galileo und Satelliten-Navigation Teil 2

Der technologische Durchbruch von Satelliten-Navigation für die Zivilgesellschaft erfolgte Ende des zwanzigsten Jahrhunderts mit dem US-amerikanischen GPS-System (Global Positioning System), das weltweit, kostengünstig und mit relativ hoher Genauigkeit Position, Navigation und Zeit liefert.
Einleitung
Global Positioning System (GPS) ist ein spezieller Anwendungsfall von Global Navigation Satellite Systems (GNSS), das zwar primär für militärische Anforderungen entwickelt wurde und betrieben wird, aber mit dem freien Signal Standard Positioning Service auch von der Zivilgesellschaft genutzt werden kann. Schon während des Kalten Krieges hat die Sowjetunion ein alternatives Satellitennavigationssystem entwickelt und betrieben, das sogenannte GLONASS. Aufgrund des überzeugenden Erfolges des US-amerikanischen GPS, der Erkenntnis der strategischen Wichtigkeit von Weltraumtechnologien für moderne Industriegesellschaften sowie aus industriepolitischen Überlegungen wurden sowohl in der EU mit Galileo als auch in China mit COMPASS/BEIDOU von Beginn des 21. Jahrhunderts an die Grundlagen für ein eigenes weltweites Satellitennavigationssystem gelegt. Die offizielle Koordinierung dieser Global Navigation Satellite Systems erfolgt insbesondere auf UN-Ebene im „International Committee on Global Navigation Satellite Systems“ (ICG).
Das europäische GNSS Galileo ist nach dem italienischen Universalgelehrten Galileo Galilei, geboren am 15. Februar 1564 in Pisa, benannt, der mit seinen bahnbrechenden Entdeckungen vor allem in der Mechanik und der Astronomie als Begründer der naturwissenschaftlichen Methode gilt.
Eines der primären Ziele der europäischen Entscheidungsträger war es, trotz der relativ hohen Gesamtkosten von mehreren Milliarden Euro, mit der Entwicklung eines eigenen GNSS einen möglichst großen Mehrwert für die Gesellschaft zu erzeugen.
Derzeit werden durch Galileo folgende vier Dienste angeboten bzw. sind in der Implementierungsphase, um die in der Abbildung 2 angesprochenen Nutzergruppen bestmöglich bedienen zu können:
- Open Service (OS): Galileo open and free of charge service set up for positioning and timing services.
- High Accuracy Service (HAS): A service complementing the OS by providing an additional navigation signal and added-value services in a different frequency band. The HAS signal can be encrypted in order to control the access to the Galileo HAS services.
- Public Regulated Service (PRS): Service restricted to government-authorised users, for sensitive applications that require a high level of service continuity.
- Search and Rescue Service (SAR): Europe’s contribution to COSPAS-SARSAT, an international satellite-based search and rescue distress alert detection system.

Das Open Service ist für alle GNSS-Nutzer grundsätzlich frei zugänglich. Der Empfang bzw. die Nutzung dieses Dienstes hängt primär von der verwendeten Hard- und Software des Empfängers ab und kann beim Einkauf relativ einfach überprüft werden (Galileo-fähig: Ja oder Nein). Das High Accuracy Service ist derzeit noch in der Planungsphase und soll speziellen Nutzergruppen eine höhere Positionsgenauigkeit liefern. Das PRS ist der verschlüsselte Dienst von Galileo und besonders störsicher und robust. Der SAR-Dienst ist der europäische Beitrag zum weltweiten Notfall- und Rettungssystem COSPAS-SARSAT. Der Servicebeginn hängt von einer Reihe von Faktoren ab und ist für jeden der angeführten vier Dienste unterschiedlich. Grundsätzlich ist jedoch von folgendem Zeitplan für Galileo auszugehen: Die Initial Operational Capability (IOC) wurde bereits 2016 erreicht. Die Full Operational Capability (FOC) ist für 2020 vorgesehen.

Galileo wurde nicht als Konkurrenz zum US-amerikanischen GPS entwickelt, sondern die einzelnen GNSS sollten sich durch Interoperabilität gegenseitig unterstützen bzw. gemeinsam bessere Dienste für die Gesellschaft anbieten können.
Das Prunkstück von Galileo, wie bei den anderen GNSS auch, sind die Satelliten. Die vollständige Konstellation wird 24 aktive Satelliten (plus Reservesatelliten) umfassen, die auf ca. 23 000 km Höhe in jeweils etwa 14 Stunden die Erde in drei Ebenen im Winkel von 56 Grad umkreisen. Diese Parameter wurden so gewählt, um mindestens vier Satelliten jederzeit über jedem Ort der Erde „sichtbar“ zu haben. Die Satelliten haben eine geplante Lebensdauer von mindestens zwölf Jahren und senden das wichtige Navigationssignal auf drei Frequenzbändern. Außerdem sind sie zusätzlich mit einem speziellen Search and Rescue-Transponder ausgestattet.
Die aktuelle Konstellation der Galileo-Satelliten umfasst, nach dem derzeit letzten Satellitenstart im Juli 2018 und der Operativsetzung dieser letzten vier Satelliten am 11. Februar 2019, in Summe 26 Satelliten im Orbit. Von diesen 26 Satelliten sind aktuell 22 für die Navigationsberechnungen voll einsatzbereit und zwei weitere in Testung. Die Galileo-Satelliten haben neben der offiziellen Satellitenkennung noch jeweils einen landesspezifischen Namen. Die Basistechnologie dieser vier GNSS (US-GPS, russisches GLONASS, europäisches Galileo und chinesisches BEIDOU) ist sehr ähnlich, jedoch teilweise mit unterschiedlichen Frequenzen, Modulationen und Services implementiert.
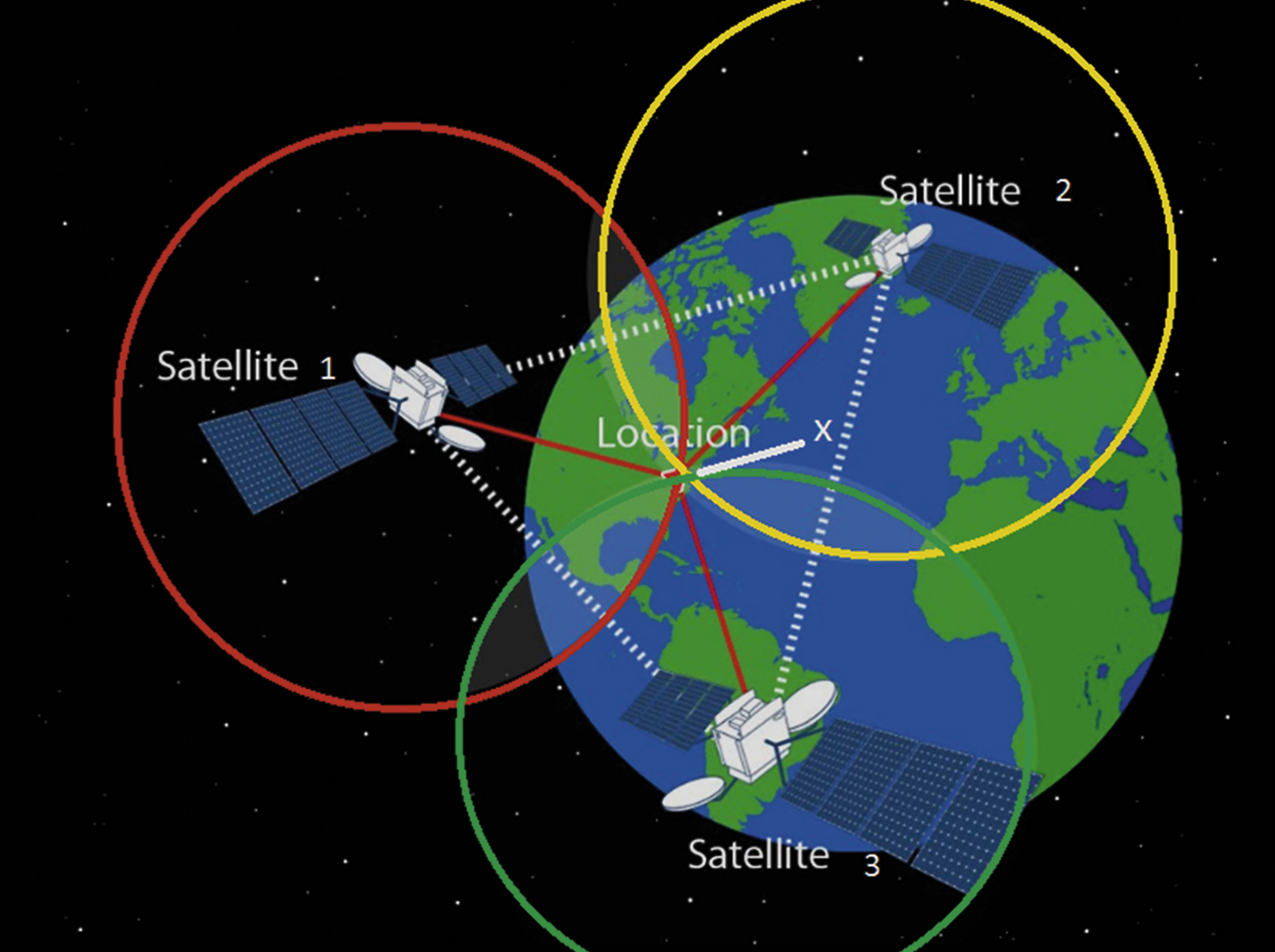
Die Standortberechnung bei Satellitennavigation erfolgt grundsätzlich nach dem Prinzip der Trilateration, dem Schnittpunkt der Entfernung von mindestens drei bekannten Standorten (siehe Abb. 4). Die Entfernungsberechnung vom Satelliten zum Standort bzw. dem Empfänger (direkter Signalweg notwendig, im Sinne von „line of sight“ (LOS) basiert auf der Laufzeit des Funksignales. Diese Methode verlangt zur Korrektur der Laufzeit das Signal eines zusätzlichen, vierten Satelliten. Zur vollständigen Berechnung der Koordinaten müssen daher mindestens vier Satellitensignale empfangen werden.
Genauigkeit und Fehlerquellen
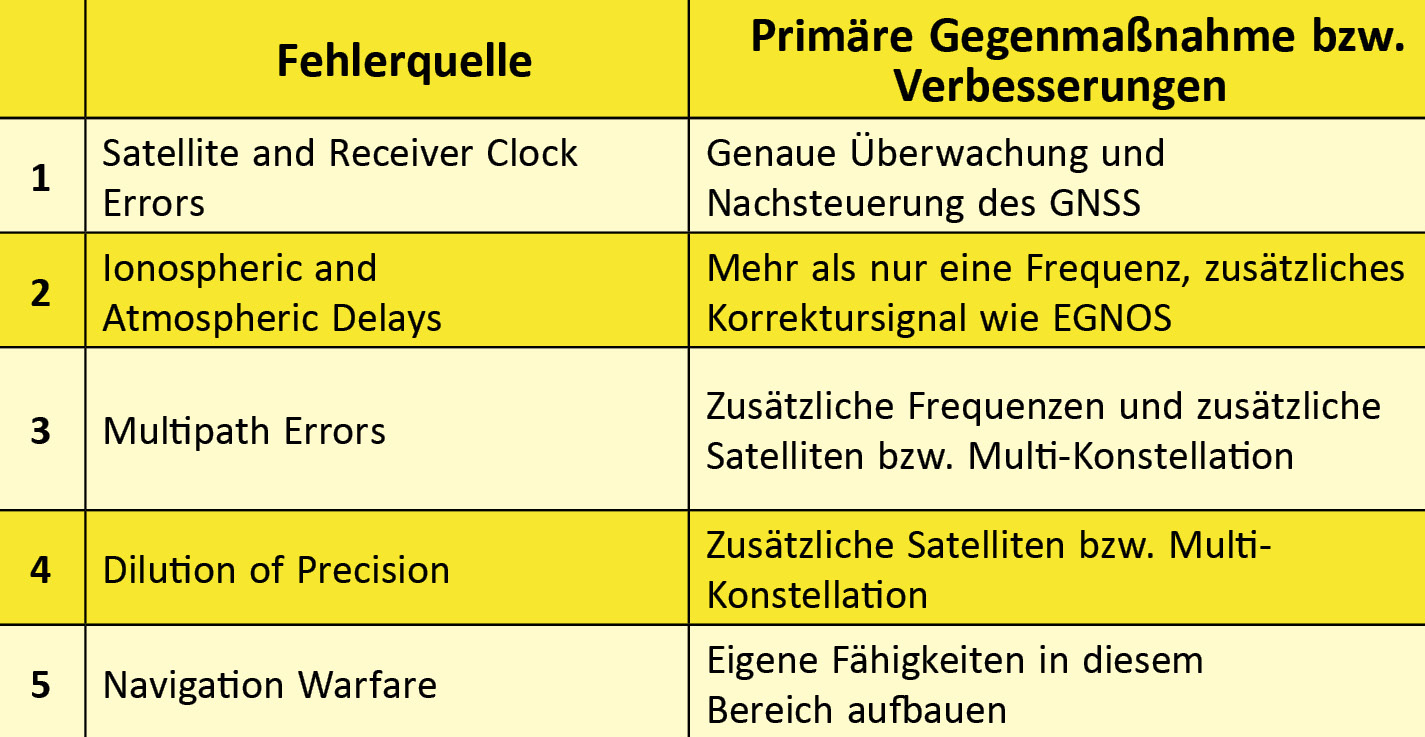
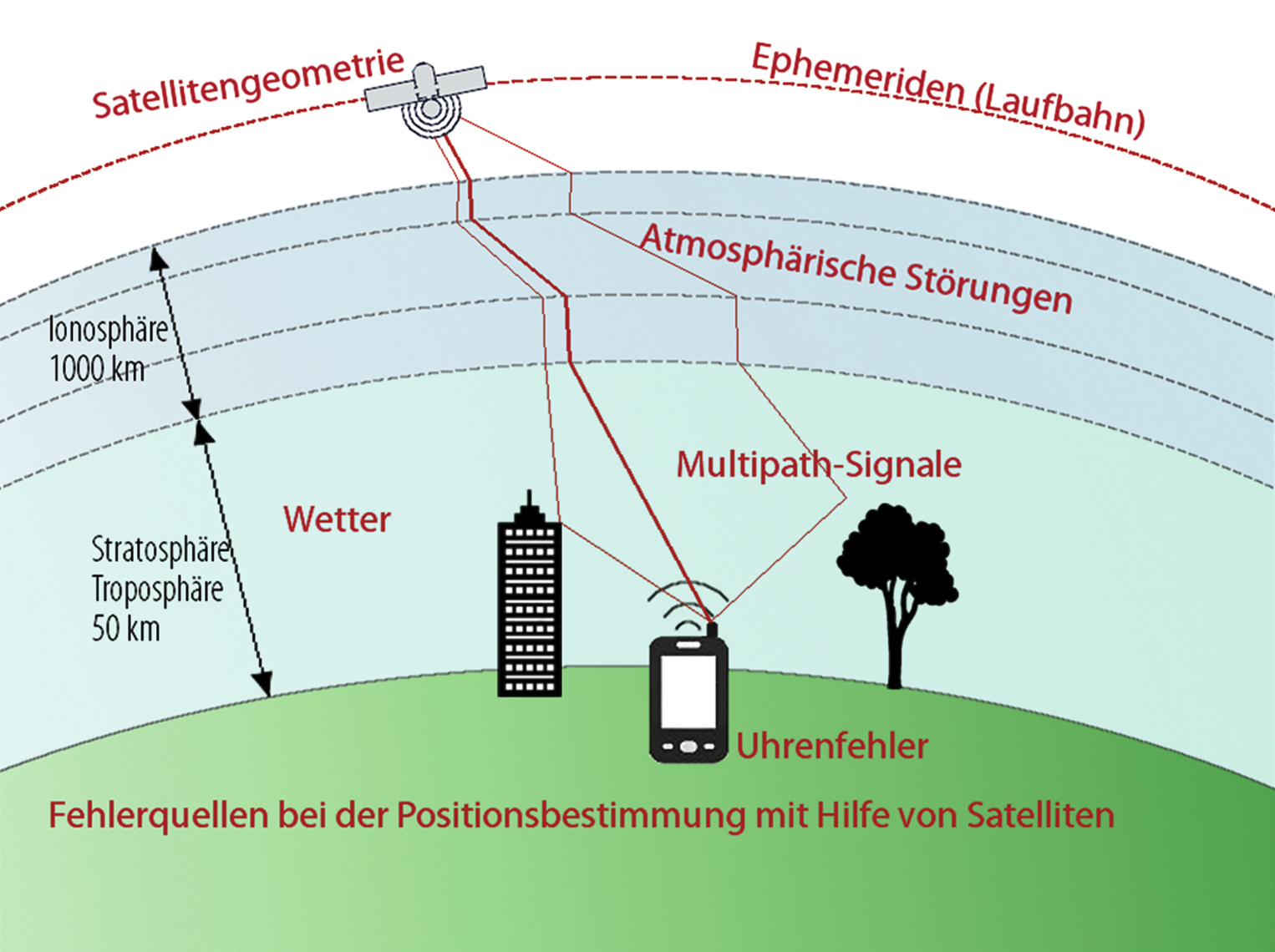
Die Genauigkeit ist abhängig von einer Reihe von Faktoren, aber insbesondere von der Bauart des Empfängers. Derzeit wird eine horizontale Genauigkeit von einigen Metern bis zehn Meter für die einzelnen GNSS publiziert. Wie bei allen technischen Systemen gibt es trotz der Genialität des Konzeptes bei der realen Umsetzung Fehlerquellen (siehe Abb. 5). Bei den besprochenen GNSS, inklusive dem Galileo, sind insbesondere folgende fünf Fehlerquellen zu berücksichtigen:
Satellite and Receiver Clock Errors (Satellitenfehler)
Schon kleinste Abweichungen vom Idealzustand der Satelliten, wie Satellitenlaufbahn, Gravitationseffekte, aber insbesondere Fehler in der Atomuhrzeit, könnten bei der Positionsberechnung rasch zu gröberen Falschberechnungen führen.
Ionospheric and Atmospheric Delays (Atmosphärische Fehler)
Die Funksignale durchdringen von 23 000 km Höhe nicht völlig homogen und ohne Interaktion die Tropo- und Ionosphäre, sondern werden u. a. bei Übergängen (z. B. Schichtgrenzen) leicht gebrochen; daraus ergeben sich bei der Positionsberechnung, die auf einer idealen Wellenausbreitung basiert, atmosphärische Fehler bzw. Abweichungen in der Laufzeit.
Multipath Errors (Mehrwegempfang)
Signalreflektionen an der Erdoberfläche durch feste Materialen, wie Gebäude, Bäume oder Täler, können dazu führen, dass dasselbe Signal vom Empfänger mehrfach empfangen wird und damit zu Widersprüchen bzw. Ungenauigkeiten in der Positionsberechnung führt.
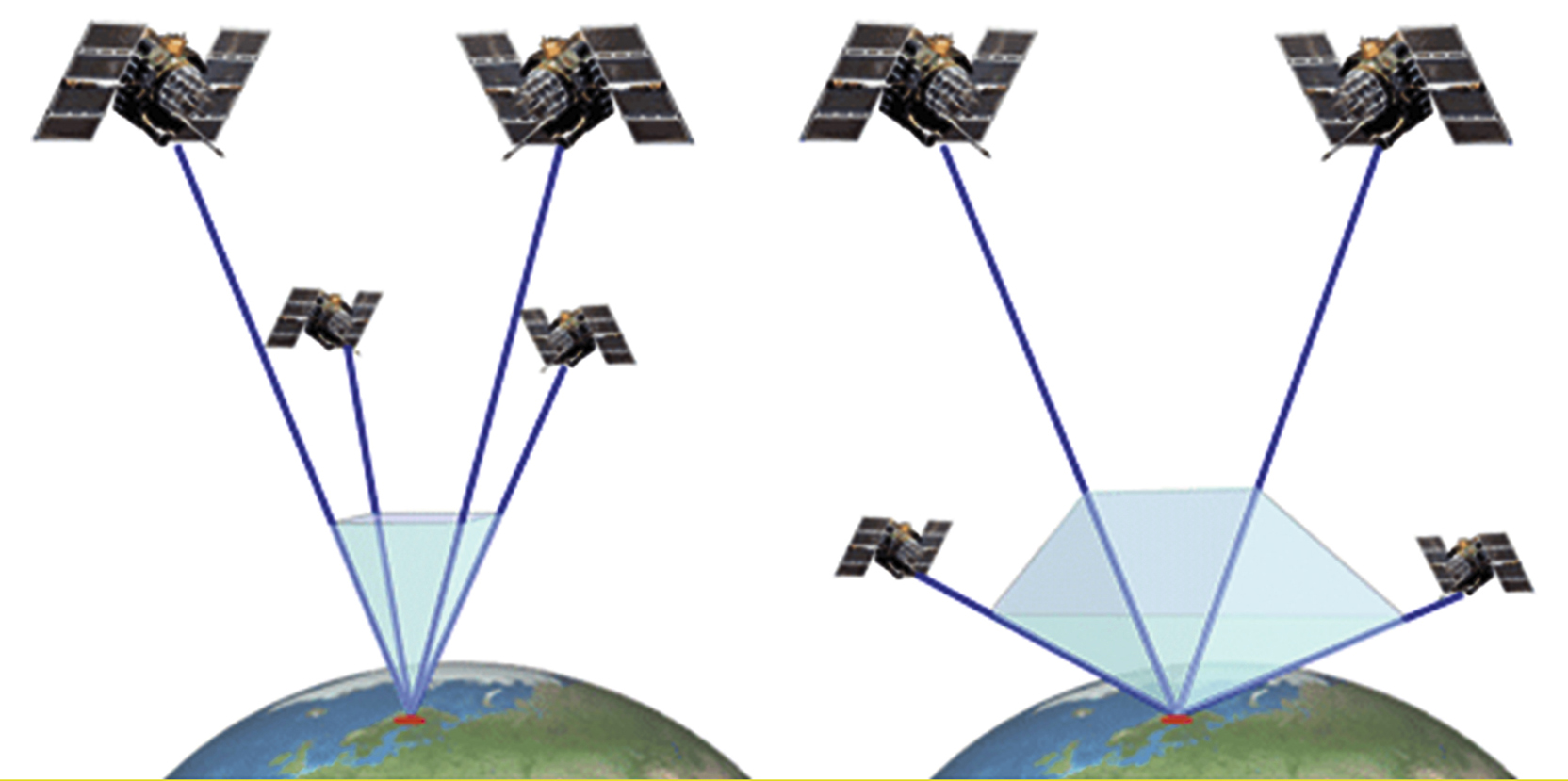
Dilution of Precision (Einfluss der Satellitengeometrie)
Die Position der für die Berechnung herangezogenen Satelliten zueinander trägt ebenfalls zur Genauigkeit der Koordinatenlösung bei (siehe Abb. 6). Weitwinkelig auseinanderstehende Satelliten bilden bessere Kugelschnitte als sehr nahe beieinanderstehende Satelliten.
Navigation Warfare (künstlich ausgelöste Fehler bei der GNSS-basierten Positionsberechnung)
In dieser Gruppe werden die technisch-militärischen Aktivitäten zur absichtlichen Signalverschlechterung bzw. Veränderung, insbesondere durch Interferenz, Jamming, Spoofing (Manipulation, Verschleierung) sowie Meaconing (Abfangen und weitersenden), zusammengefasst und sind Fähigkeiten bzw. Maßnahmen, die deutliche Überschneidungen zur Electronic Warfare haben. Konkret wird dieser Bereich „sichere PNT-Services“, „Navigation Warfare“ oder „Navigation Operations“ genannt.
Verbesserung der Genauigkeit
Zusätzlich zu den grundsätzlichen Verbesserungen wie Multi-Konstellation oder Mehrfach-Frequenznutzung sind noch eine Reihe von weiteren technischen Implementierungen am Empfänger für eine genauere Positionsbestimmung möglich. Diese umfassen insbesondere optimierte Hardware, verbesserte Antennenbauart und zusätzliche Softwareinstallationen.
Ad Satellite and Receiver Clock Errors
Zur Sicherstellung einer möglichst genauen Konstellation, inklusive einer koordinierten hochpräzisen Atomzeit, wird bei Galileo ein weltweites Netzwerk von verbundenen Bodenstationen (ground segment) betrieben (siehe Abb. 7). Durch eine hochpräzise Operationsführung 24/7 wird die Fehlerquelle, resultierend vom „space segment“, möglichst minimiert.

Ad Ionospheric and Atmospheric Delays
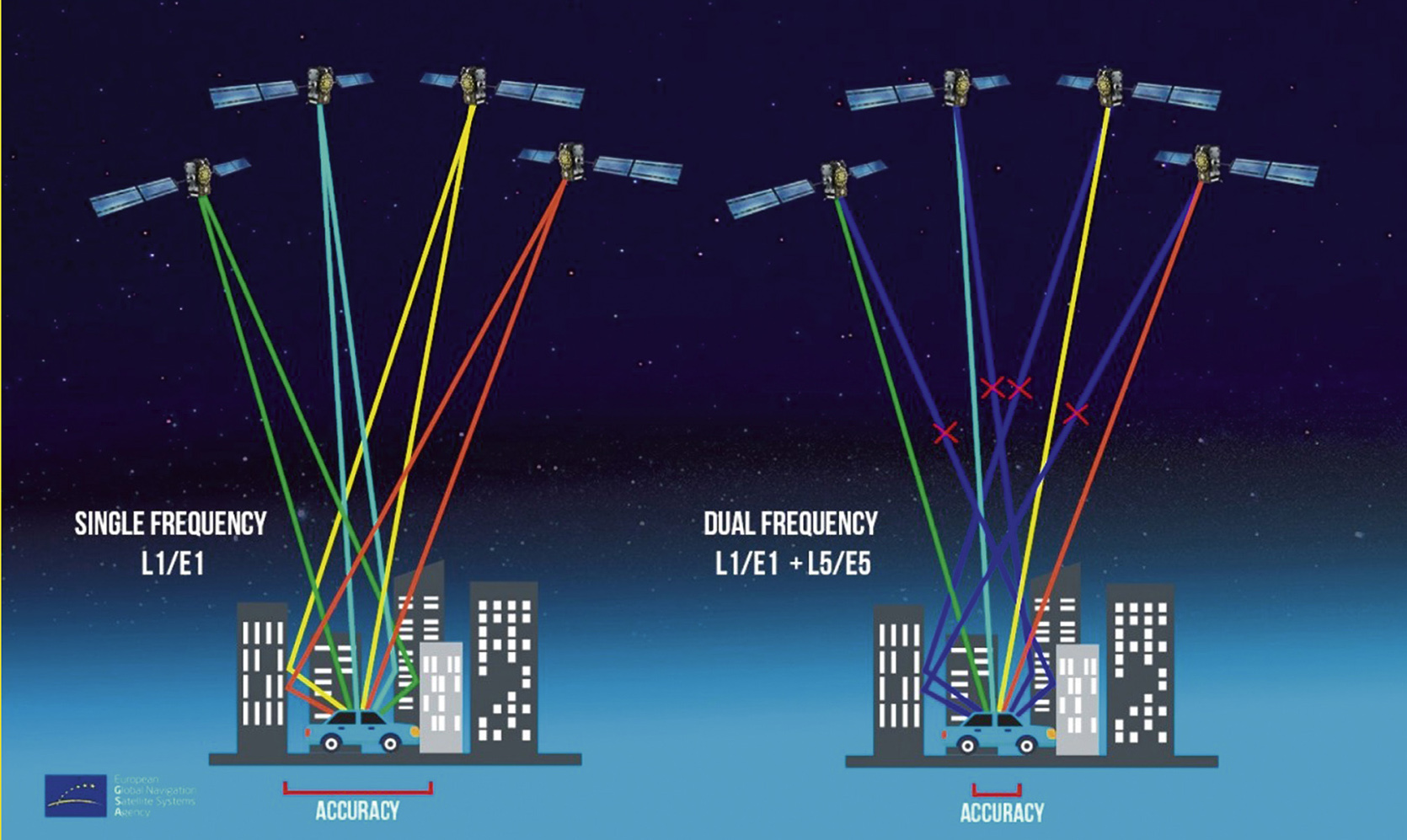
Die Auswirkungen von Laufzeitdifferenzen durch die Troposphäre und Ionosphäre können durch zusätzliche Frequenzen sowie ein spezielles Korrektursignal minimiert werden. Das ursprüngliche GPS-Signal für den öffentlichen Zugriff wurde ausschließlich auf L1 1575, 42 MHz gesendet. Seit 2014 wird auf dem GPS ein zweites ziviles Signal, das L2C, versendet. Auch ein drittes ziviles Signal, L5, ist in Implementierung (siehe Abb. 8). Durch diese zusätzlichen Signale lassen sich potenzielle Laufzeitverzögerungen, die sich je nach Frequenz leicht unterschiedlich auswirken, zum Großteil rechnerisch bereinigen. Unter der Annahme, dass ein Mehr-Frequenzempfänger verwendet wird, ergibt sich dadurch eine substanzielle Verbesserung der Genauigkeit, sprich eine geringere Fehlerquote.
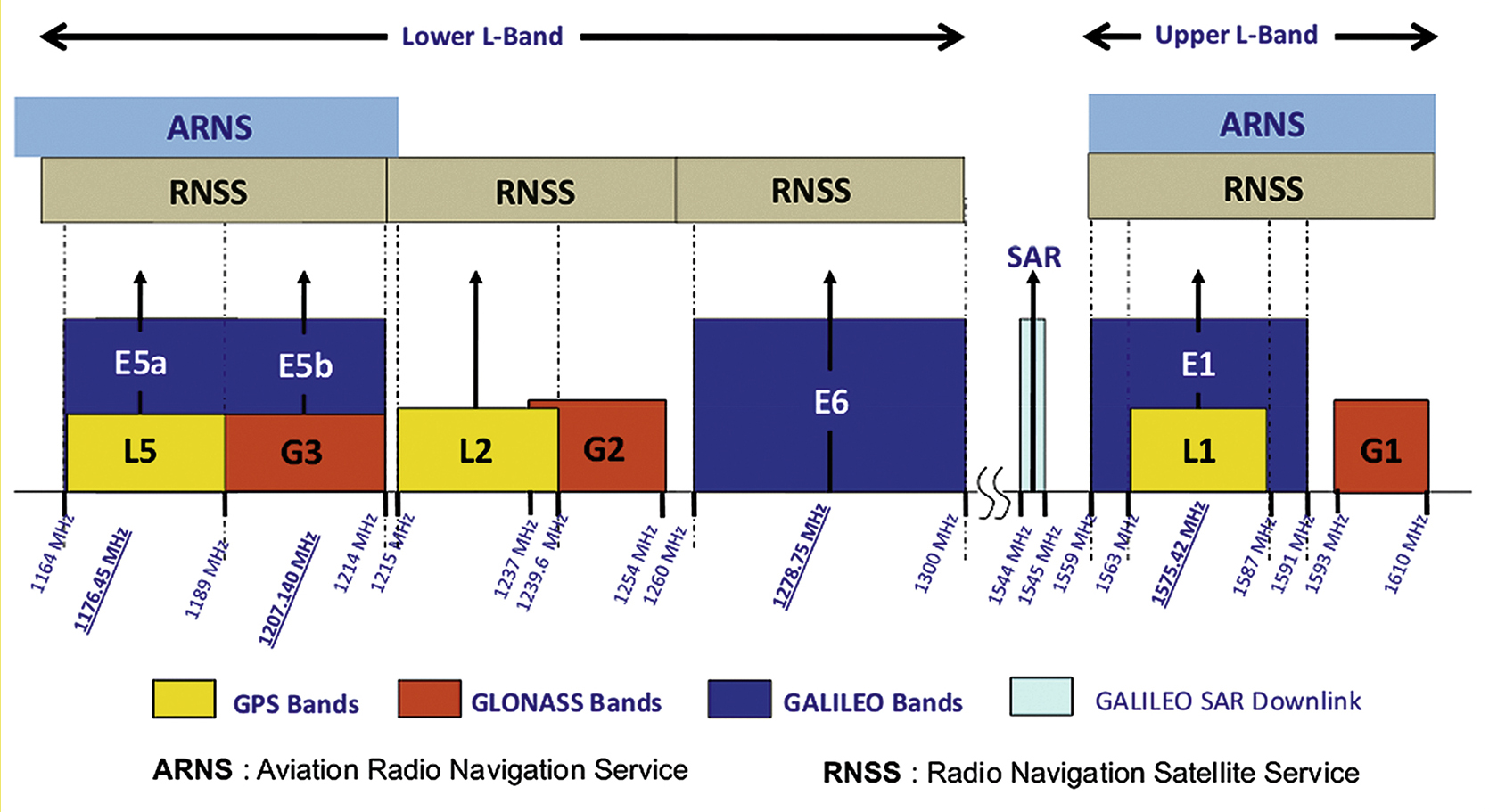
Was beim GPS eine jahrzehntelange Entwicklungslinie darstellt (von L1 ergänzt mit L2 und dann zusätzlich L5), wurde bei Galileo von Beginn an implementiert. Darüber hinaus sind die Frequenzbänder des Galileo etwas breiter und lassen damit mehr Freiraum bei Signalkombinationen und Modulationsvariationen. Die vier Galileo-Dienste OS, HAS, PRS und SAR werden in einer klugen Kombination mit den drei Bändern E1, E5 und E6 bedient. Zusätzlich zur Multi-Frequenzlösung, die derzeit sowohl bei GPS als auch bei Galileo implementiert wird, würde ein spezielles Korrektursignal wie das des europäischen EGNOS (European Geostationary Navigation Overlay Service) ebenfalls die Fehlerquellen aus den Laufzeiten massiv reduzieren (siehe Abb. 9).
Ad Multipath Errors
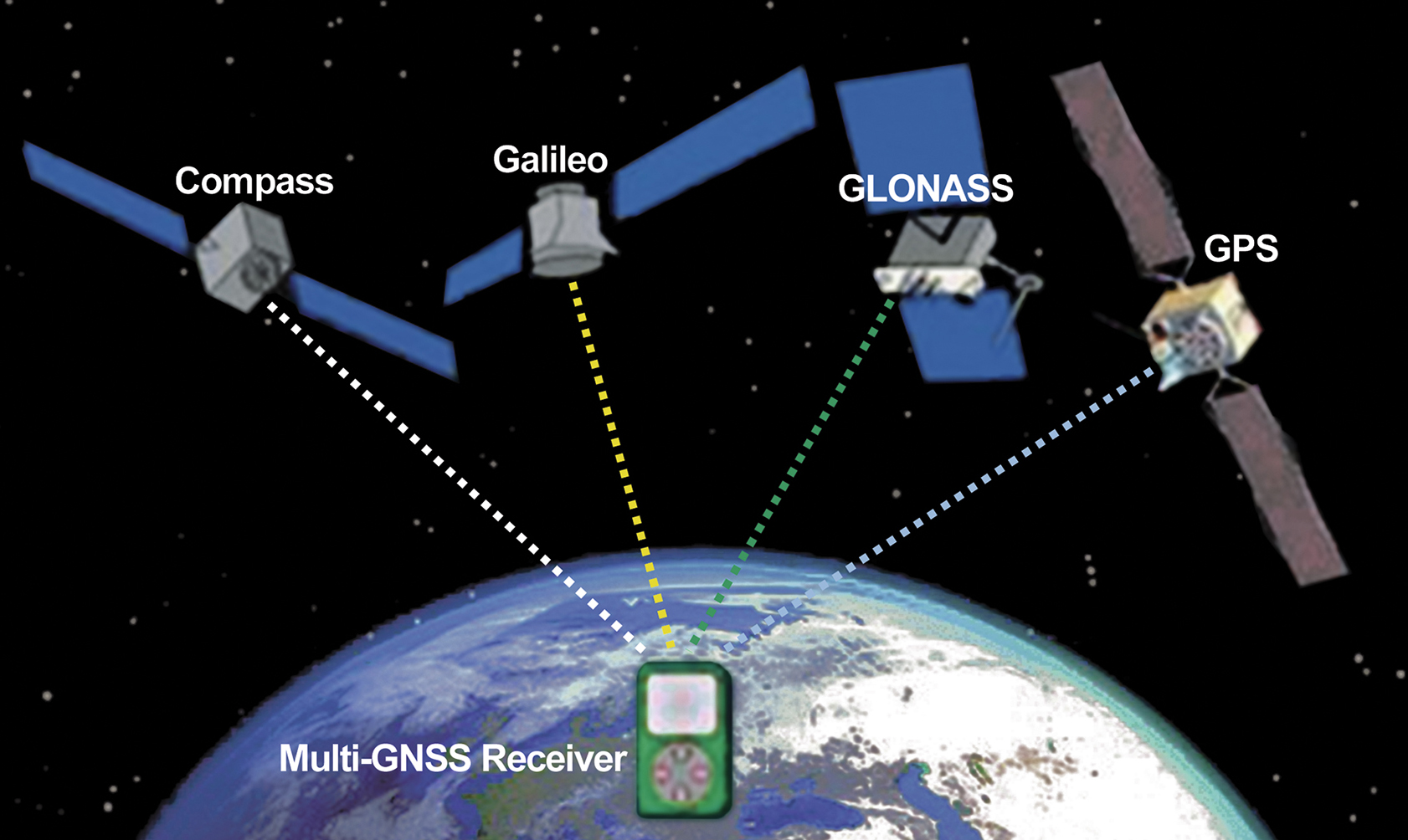
Die Fehlerquelle Multipath Errors bzw. Mehrwegempfang kann (neben Hardware- und Softwareveränderungen im Empfänger) mit folgender Maßnahme bzw. Option reduziert werden. Die derzeit verfügbare GNSS-Konstellation sowohl mit GPS als auch Galileo, bei der beide GNSS auf zumindest zwei Frequenzen senden, ermöglicht eine rechnerische Korrektur im Empfänger, wenn dieser mehrfrequenz-und multikonstellations-tauglich ist (siehe Abb. 10).
Ad Dilution of Precision
Die Verbesserung der Geometrie der Satelliten (Dilution of Precision) kann neben der Optimierung im Empfänger im Normalfall durch zusätzliche Satelliten, die interoperabel mit dem Empfänger sind, gelöst werden. Die derzeitige Summe der GNSS-Satelliten im Orbit beträgt ca. 30 GPS-, 25 BEIDOU-, 25 GLONASS- und die 22 Galileo-Raumsonden. Daher ergibt sich rein statistisch eine hohe Wahrscheinlichkeit, nicht nur die Signale von den unbedingt notwendigen vier Satelliten, sondern von bis zu 20 Satelliten empfangen zu können – unter der Annahme, dass der Empfänger für Multi-Konstellationen ausgelegt ist.
Ad Navigation Warfare
Im Zentrum der aktuellen Überlegungen zu Navigation Warfare bzw. Navigation Operations steht die Notwendigkeit, für die eigenen Systeme gesicherte PNT-(Position Navigation Timing-)-Services, z. B. durch Satellitennavigation bereitzustellen und gegebenenfalls im Einsatz dem Gegner den Zugang zu diesen Diensten zu verwehren. Hierzu können u. a. diverse Methoden der elektronischen Kriegsführung angewandt werden, die Szenarien-basierend vorbereitet und nach einer qualifizierten Risikomanagementanalyse eingesetzt werden sollten.
Zusammenfassung
Die moderne Satellitennavigation ist geprägt durch die Services von vier GNSS-Systemen; eines davon ist das gerade in Vollbetrieb kommende europäische Galileo. Die Kombination dieser GNSS sowie die Mehrfrequenzlösungen, die diese Systeme derzeit implementieren, ermöglichen modernen Empfängern die klassischen Fehlerquellen rechnerisch großteils zu kompensieren, und sie beeindrucken mit einer weltweiten Genauigkeit im Meterbereich. Der schon jetzt hohe Durchdringungsgrad von GNSS-Empfängern (vom einfachen Handy bis zum Linienflugzeug) wird weiter ansteigen und speziell die Weiterverwendung der PNT-Lösungen (besonders Timing) wird insbesondere durch M2M-(machine to machine-)Prozesse, z. B. im Zusammenhang mit autonomem Fahren oder Drohnen, rapide voranschreiten. Jede moderne Gesellschaft, aber auch die Streitkräfte im 21. Jahrhundert, wären gut beraten, diese technologischen Entwicklungen bei Position Navigation Timing Services bzw. der Satellitennavigation umfassend zu berücksichtigen.
wird fortgesetzt
Brigadier Mag. Dr. Friedrich Teichmann, MSc MAS ist Leiter des Institutes für militärisches Geowesen.





